
ROBOTS GO GREEN!

RESULTS: PROGRAMMING OUR ROBOT FARMER
Robots go green! is an Erasmus project for sustainable agriculture that uses robotics to detect environmental parameters inside a greenhouse. In this way, water and energy resources can be optimized.
Our robot is driving inside the greenhouse, reading environmental parameters, at the same time, such as light, CO2, humidity and temperature and can send these data to a mobile device.
We describe in this document the entire programming process carried out by the students and some of its results.

During the development of our project, the students have been working on a mobile robot based on the Arduino UNO board that had the following elements:
Arduino UNO board
Driver L298N
4 DC motors
LDR -luminosity sensor
MG811 CO2 level sensor
DHT22 Humidity and temperature sensor
HC06 Bluetooth module
Different free programs have been used for the training of students
and for the programming of the robot and the APP.
On the one hand, we have used the TinkerCAD circuits program for the online training of the students and to simulate the circuits and programs. The Arduino IDE has been used to program the robot, while the APPinventor program has been used to program the application for the mobile device.



Configure Bluetooth Module
With this program for Arduino IDE we can configure the bluetooth module and link it to our mobile device.

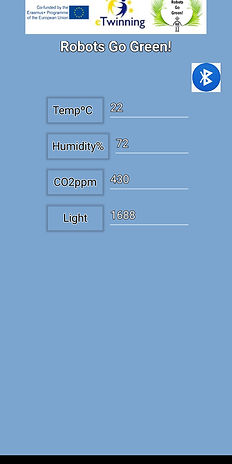
Reading environmental parameters: T, H, L and CO2
In the following video different sensors are explained by a student during the process and in the last meeting in Germany. The sensors are directly connected to the board as well as the bluetooth device.
These parameters can be read by the program for IDE Arduino downloaded to the board. With the APP created for the mobile device, the parameters are shown thanks to Bluetooth connection.


WORKING WITH MOVEMENT OF THE ROBOT
Authomatic Movement
Our robot can move automatically throughout programming the path. This kind of movement could be suitable for closed and defined paths inside the greenhouse.
Only changing velocity and time parameters one can adjust the movement to the real path.

Line Follower
Another possibility is that the robot moves along the path of a black line (drawn on the greenhouse) floor using infrared detectors, as can be seen at the video during the preparation of the Online meeting in Valencia.


Manual movement via Bluetooth from a mobile device using an app
The third possibility that the teams have analyzed is that of control via bluetooth using an app installed on the mobile device to control the movement of the robot and whose latest version you can download below.


FINAL CODE: Manual movement and reading environmental parameters via Bluetooth from a mobile device using an app
In this case, the movement of the robot and the reading of the environmental parameters are carried out by means of a mobile device via bluetooth using the APP.


READING & SENDING ENVIRONMENTAL PARAMETERS


